 田帅康学习笔记
田帅康学习笔记记录一个困扰两天的问题:git 换行符LF与CRLF转换问题
1、背景这两天在维护公司一个老旧项目,编译是用bat批处理+python实现的,但是把最新的代码拉下来后发现编译不过去,提示bat指令有错误,并且是很离谱的错误,但是回退到之间的稳定版本,命令行编译是没有任何问题的,经过两天N多次试错失败后终于发现了一些端倪:最新的代码文件都是LF(line feed)的回车换行方式,但是我在windows下开发,应该是CRLF(carriagereturnlin
1、背景这两天在维护公司一个老旧项目,编译是用bat批处理+python实现的,但是把最新的代码拉下来后发现编译不过去,提示bat指令有错误,并且是很离谱的错误,但是回退到之间的稳定版本,命令行编译是没有任何问题的,经过两天N多次试错失败后终于发现了一些端倪:最新的代码文件都是LF(line feed)的回车换行方式,但是我在windows下开发,应该是CRLF(carriagereturnlin
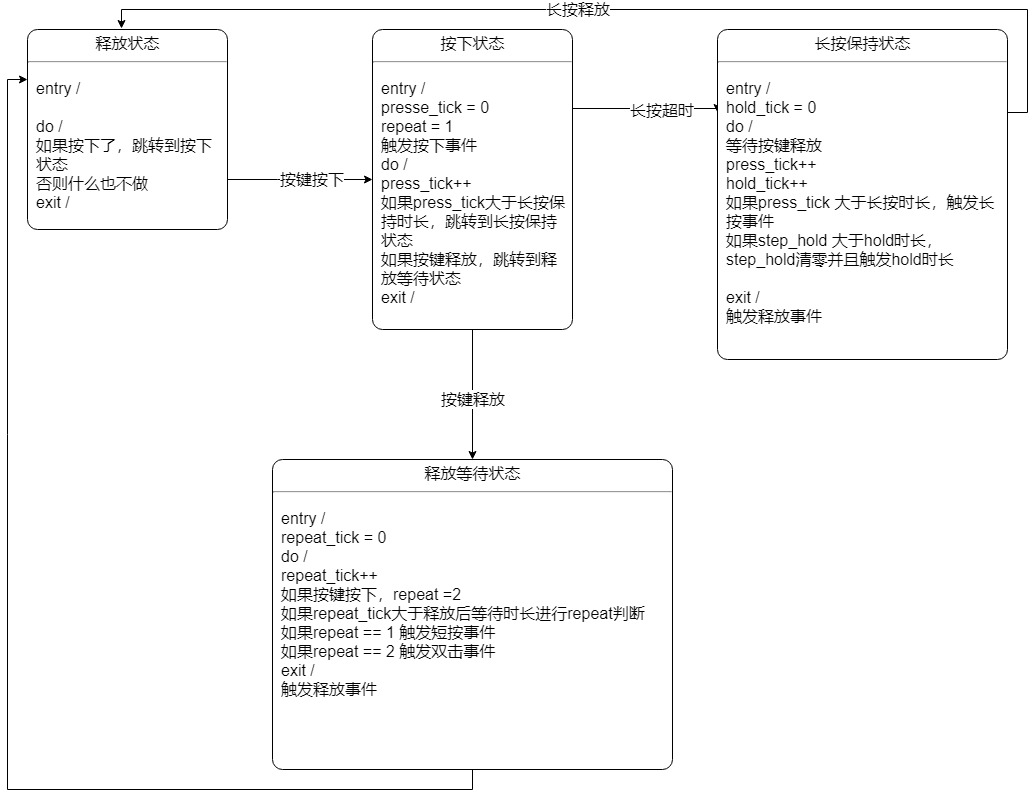
1、模块简介按键检测模块用于嵌入式系统上实现按键的扫描,实现按键的触发检测,并对短按、长按等状态进行识别检测。2、需求分析按键检测需要可以识别多个按键的多种事件触发,并且需要对事件做出响应处理。功能性需求可以实现多个按键检测实现按键扫描事件检测和事件回调触发非功能性需求方便移植方便添加按键代码实现简洁易读本文实现的按键模块主要有以下事件:按下事件释放事件短按事件双击事件长按X秒事件长按保持事件(比
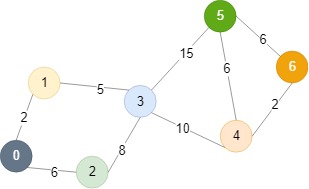
Dijkstra算法的核心点是贪心算法:不断寻找最短的点,在最短的点上更新最短路径1.前言想要了解学习Dijkstra算法,需要先了解无向图与权重图,无向图顾名思义就是没有方向的图,下面表示了有向图和无向图以及权重图2.什么是Dijkstra算法Dijkstra 算法,可以寻找图中节点之间的最短路径。特别是,可以在图中寻找一个节点(称为“源节点”)到所有其它节点的最短路径,生成一个最短路径树。荷兰
前提:坐标使用右手坐标系,角度逆时针旋转为正。绕X轴旋转角度为 俯仰角 即Pitch绕Y轴旋转角度为 偏航角 即Yaw(Head)绕Z轴旋转角度为 翻滚角 即Roll1、平面二维坐标点的旋转根据三角函数关系,可以列出向量OP与OP'的坐标表示形式:x = |OP|•cosα x′ = |OP|•cos(α+β) y = |OP|•sinα y′ = |O
你是否对C语言命令行黑框感到厌倦,今天来为你的C编程增加一些可视化窗口吧!1、windows下安装C编译器这对于一个开发者来说简直是太业余了,如果你是一个开发者,你的电脑上怎么会没有gcc呢,如果你是一个新手,可以转到这个链接:https://zhuanlan.zhihu.com/p/355510947。我们可以通过在命令行输入gcc来验证是否安装成功PS C:\Users\13588\Deskt
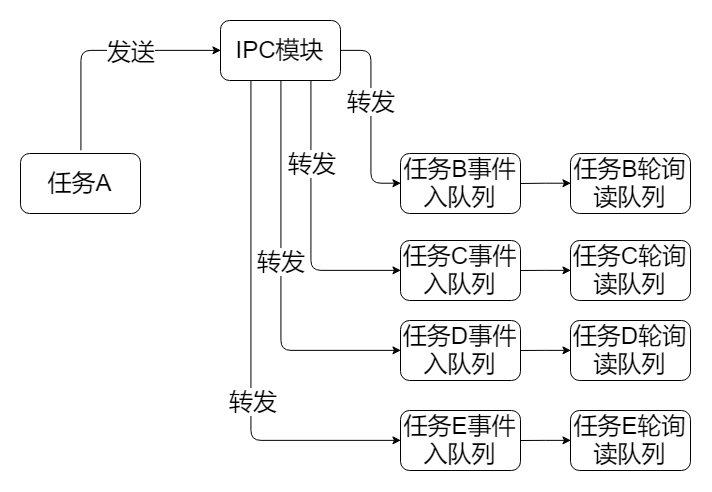
1、什么是IPC在做一个比较简单的项目时,我们可以使用全局变量等作为标志位进行逻辑判断,但是在功能较多的项目上时,使用全局变量作为程序间的标志位当然是不可行的,代码将会混乱且复杂,不利于解耦,因此需要使用到IPC(Interprocess communication),IPC是模块间的通信组件,主要实现的是任务之间的消息转发,广播等功能,模块功能和实现都较为简单。2、需求分析模块间的消息传递主要是

1、概述IIC(Inter-IntegratedCircuit)总线是一种由PHILIPS公司开发的两线式串行总线,用于连接微控制器以及其外围设备,IIC也被称为I2C,其实两者是完全相同的。它是由数据线SDA和时钟线SCL构成的串行总线,可发送和接收数据。两根线定义如下:数据线SDA:数据线用来传输数据时钟线SCL:时钟线用来同步数据收发2、信号分解时钟图绘制由https://wavedrom.
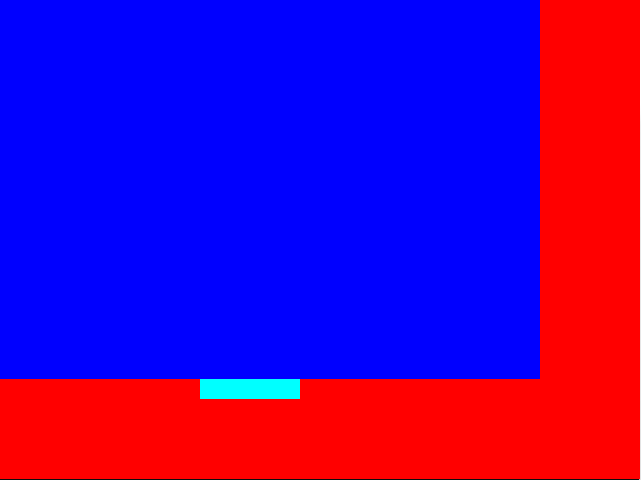
1、Physac介绍Physac是一个开源的物理引擎,所有代码实现在头文件中,仅仅有2100行代码,移植接口只需要一个画线函数,因此很容易移植到嵌入式设备等,GitHub地址为https://github.com/victorfisac/Physac2、引擎接口引擎具有以下特性:可以动态创建\销毁三种控件:圆形、多边形、四边形可以改变全局重力方向可以给控件添加力、角度力用爆炸力将多边形物理体破碎成
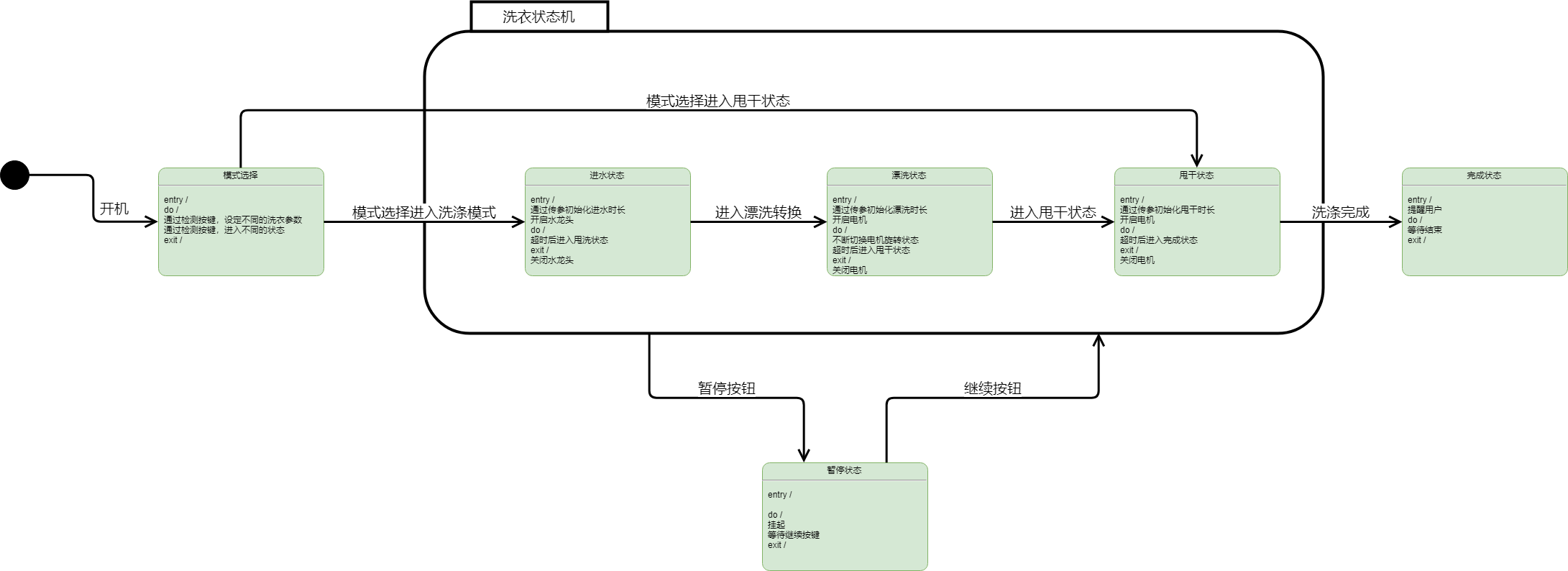
1、简述状态机在C语言编程中,可以使用状态机来实现复杂的控制流程和状态管理。状态机通常由以下几个组成部分构成:状态(State):系统或程序可能处于的不同状态,例如"待机"、"运行"、"暂停"等。每个状态代表了系统或程序的一种行为或模式。事件(Event):触发状态转换的信号或条件,可以是外部输入、定时器到期、传感器触发等。事件发生时,状态机将根据当前状态和事件来确定下一个状态。转换(Transi
调度器上下求索,方可得道之精髓引言我还在学校的时候,实验室有一个学长在B站发布了这么一个视频,B站链接在这里,并且将代码开源在github,取名为suos,对于当时的我来说,实时操作系统是一个很新鲜的东西,特别是当看到代码里面的两个函数中的while(1),这完全是超出认知的东西。如今四年已经过去了,不敢说对RTOS的远离了解的很清楚,但是也是管中窥豹,略知一二,今天就记录一下对RTOS的调度器的